Roller485 / RollerCan
-
Hi:
I've recently gotten a couple of Roller-Can motors. Very Cool. I've designed a planetary gearbox for them to perhaps use them in robotics in some way. Found I needed to tune them for my loads so
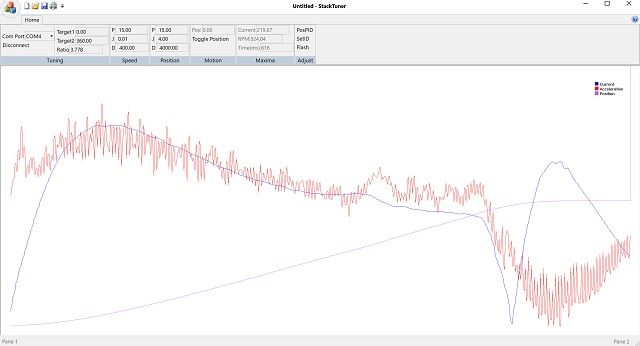
I've written a program for an ESP32 to connect them via I2C to a PC via the ESP32's USB-C port. This allowed me to write a Windows Desktop App for PID tuning the motors to get performance adjusted to the load of the motors.
Photo attached to show how it works. Is there interest in this? I can post the code for the ESP 32 and the desktop application if anyone is interested.It can move a motor, record the current, position and RPM, calculate the acceleration , send it to the desktop application so you can see what's up, change the PID parameters to get smooth motion, and flash the firmware to remember the new PID loop.
If people are interested I will post them on here if possible, or on my own website for people to download.
-
I am interested, although I think this will probably go over my head.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login